Машина для паллетирования и погрузки цемента в мешки
Первоначально расфасованный в мешки цемент покидал завод в основном путем ручной или полуавтоматической погрузки, а для приема материалов требовался ручной труд. В условиях нехватки рабочей силы и роста затрат на оплату труда компаниям необходимы полностью автоматизированные системы погрузки, которые заменят ручной труд и позволят сэкономить средства. В процессе расфасовки цемента рабочие находятся в среде с большим количеством пыли, что повышает риск профессиональных заболеваний, таких как пневмокониоз.

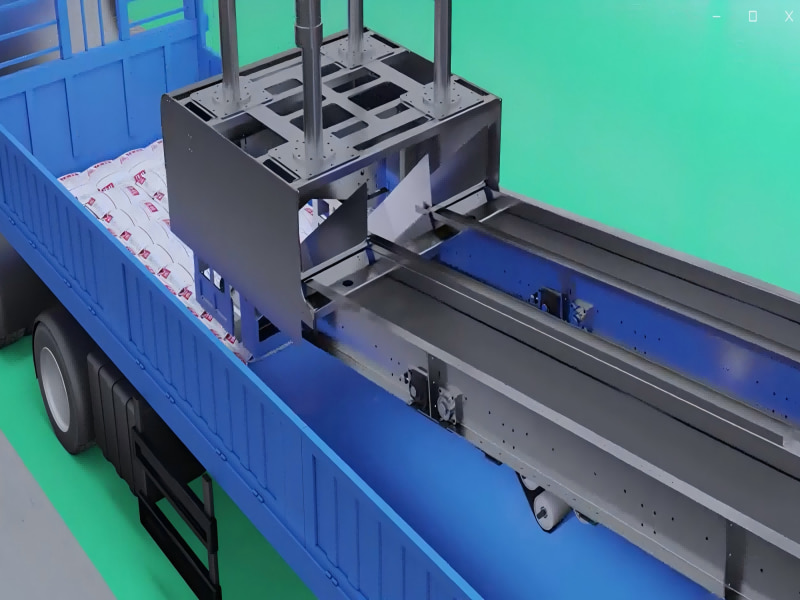
Робот-погрузчик фактически представляет собой применение манипулятора в системе фасовки цемента в мешки. Манипулятор обладает точным управлением, что позволяет повысить эффективность, снизить трудозатраты сотрудников, улучшить условия труда и сократить энергопотребление. Его использование освободило людей от лишней работы и сыграло важную роль в развитии отрасли. Полностью автоматический погрузчик цемента может адаптироваться к различным типам транспортных средств и автоматически осуществлять погрузку. Его система распознавания использует лазерное и 3D-сканирование для получения информации о транспортном средстве, а система позиционирования получает информацию о местоположении транспортного средства с помощью нескольких лазерных датчиков. Робот объединяет эту информацию для захвата, планирования и автоматической фасовки цементных мешков в мешки.
Принцип работыАвтоматизированная система загрузки цемента в мешки. Агент Цементный погрузчик Gachn gourp
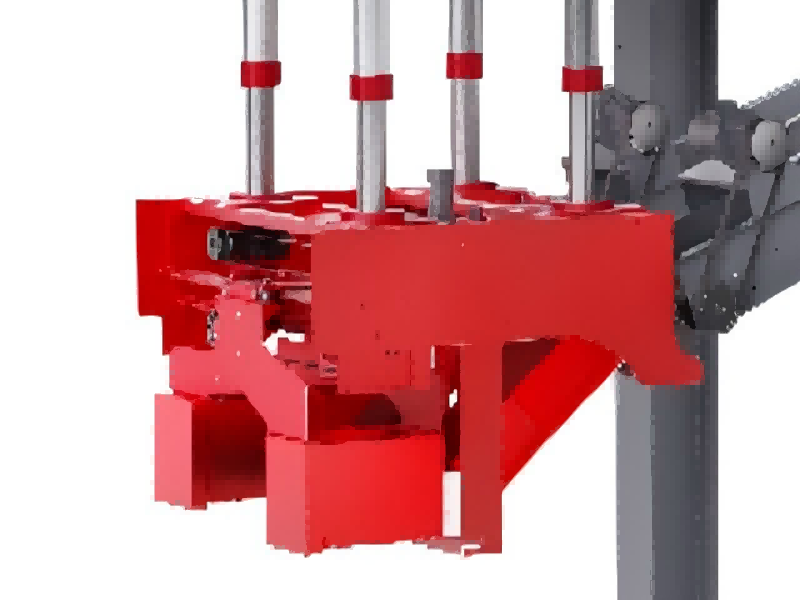
Система автоматической погрузки и укладки цемента в мешки на поддоны Gachn Gourp Loader использует технологию 3D-сканирования, которая позволяет точно определять и сканировать внешнюю форму транспортного средства для достижения точного положения загрузки, интерактивной блокировки между системой загрузки и упаковочной машиной, а также автоматической загрузки. Возможность свободного перемещения погрузчика Gachn Gourp Loader на небольшой площади обеспечивается использованием лебедки с трехмерным телескопическим механизмом, что позволяет осуществлять моделирование и координированную работу механизмов по осям X, Y и Z.
Система удаления пыли
Автоматическая система загрузки цемента в мешки, предлагаемая дилером Gachn, оснащена системой пылеудаления, состоящей из пылеулавливающего кожуха, пылеотводящего трубопровода и пылеотводящей машины, что позволяет значительно снизить количество пыли, образующейся в процессе загрузки. Большинство цементных заводов уже имеют существующие системы пылеудаления, и перед использованием требуется лишь модифицировать трубопроводы.
Пылеуловитель способен обрабатывать объем воздуха до 100 000 м³/ч.

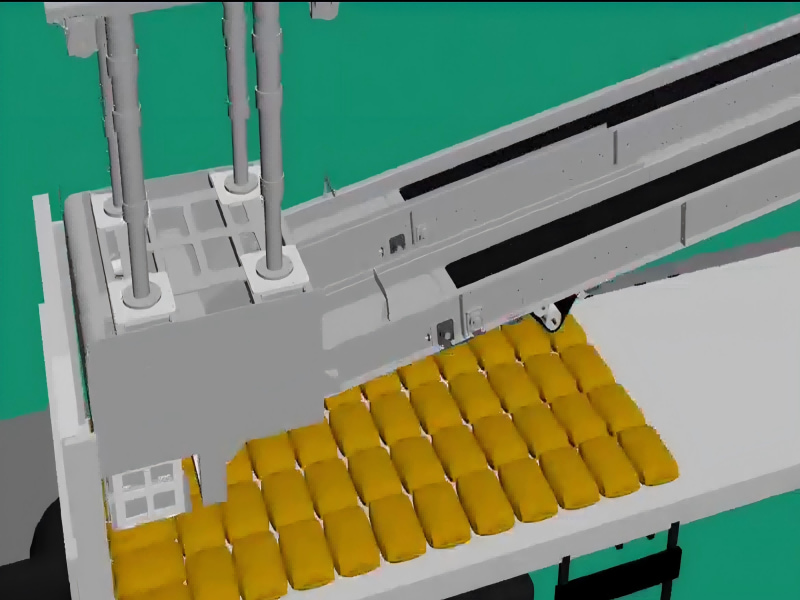
Автоматический погрузчик цемента Gachn gourp может завершить упаковку.
1. Загружаемый материал: цемент в мешках.
2. Характеристики цемента в мешках: 50 кг/мешок, 650 мм (длина) × 400 мм (ширина) × 140 мм (толщина).
3. Скорость упаковки в пакеты на упаковочной машине: 120 т/ч.
4. Производительность автоматического погрузчика: ≥90 т/ч
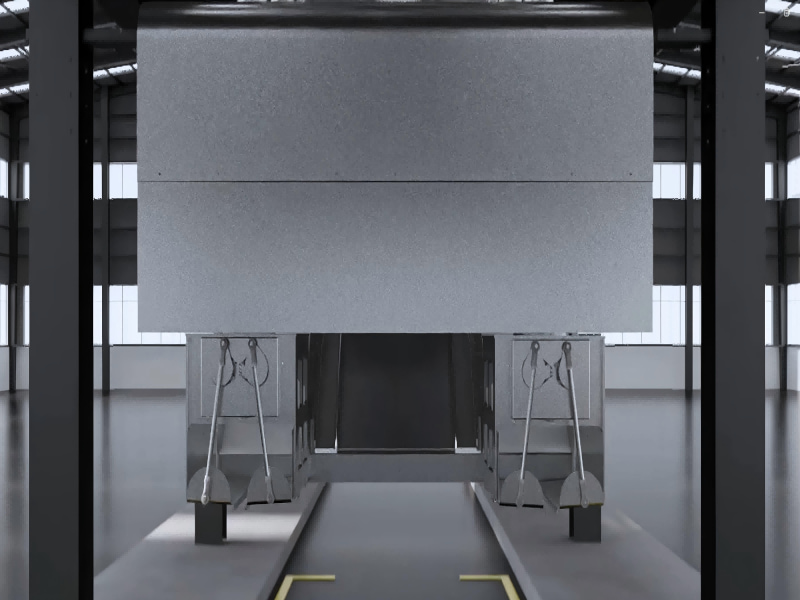
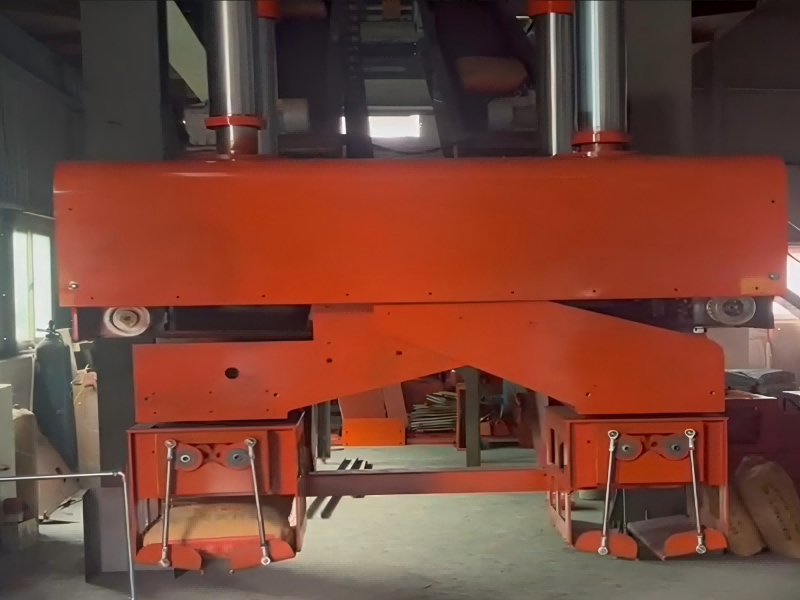
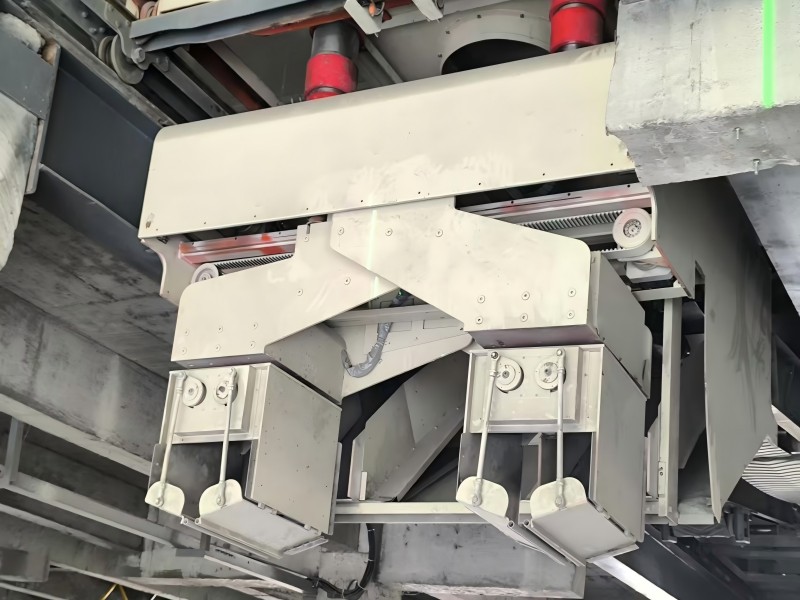
Загрузка хоста
Механизм пылеудаления в головной части робота-погрузчика состоит из телескопического механизма крепления труб, телескопического воздуховода, пылеулавливающего желоба, вертикального пылеулавливающего воздуховода и других механизмов. Вертикальный транспортировочный пылеулавливающий воздуховод и передняя часть кабины полностью входят в загрузочный отсек, обеспечивая быстрый и беспыльный сбор пыли.
Система сканирования транспортных средств (3D-сканирование)
Система сканирования транспортных средств Gachn gourp loader (3D-сканирование) позволяет не только сканировать и идентифицировать конструкцию транспортного средства, но и сканировать топливный бак на ограждении переднего отсека и свернутые палатки некоторых машин. Она также может идентифицировать отсеки с крепежными балками. С помощью внутренних расчетов системы создается соответствующая схема размещения отсеков, подлежащих упаковке, что позволяет автоматически рассчитывать вторичную загрузку.
Группа шкафов управления и датчиков:
В состав блока управления робота-погрузчика и системы датчиков входят: блок управления движением со светодиодным дисплеем, панель управления с сенсорным экраном и функцией автоматического/ручного сброса, встроенная система декодирования видео, аудиосистема, сетевая цифровая камера высокого разрешения, специализированные кабели для робота, датчики (устройство непрерывной идентификации упаковки, устройство обнаружения входа упаковки, устройство обнаружения субупаковки, устройство обнаружения на месте), система автоматического охлаждения блока управления и другие компоненты. Это обеспечивает сочетание локальной и облачной инфраструктуры, а также создание интеллектуальной платформы для погрузчика и сети 5G, что позволяет осуществлять совместное использование системы и иерархическое управление, создавая условия для интеллектуального строительства цементных заводов.
Системное программное обеспечение:
Программное обеспечение системы в основном делится на интегрированное системное программное обеспечение и программное обеспечение для считывания карт, и обеспечивает интеллектуальное моделирование и адаптивный алгоритм движения.
Интегрированное системное программное обеспечение робота-погрузчика включает в себя программное обеспечение сканирования, программное обеспечение управления, программное обеспечение автоматического управления датчиками подъема, программное обеспечение автоматического управления конвейером, программное обеспечение управления интеллектуальной системой погрузчика, базовое программное обеспечение управления системой, программное обеспечение управления автоматическим погрузчиком и другие программные системы. Программная система основана на базовом программном обеспечении управления системой и программном обеспечении управления, и взаимодействует для выполнения сканирования информации о кузове транспортного средства (включая натяжение), подъема по оси Z, перемещения по осям X и Y, работы ленточного конвейера, интеллектуальной загрузки и т. д.
Программное обеспечение для считывания карт роботом-погрузчиком делится на программное обеспечение для считывания карт и программное обеспечение для считывания идентификационных карт, и они используются совместно. После двух успешных считываний карты робот преобразует вес загруженного груза в количество загруженных мешков с помощью внутреннего компьютера, а информация о количестве мешков импортируется в «мозг» робота-погрузчика через программную систему. В этот момент робот точно выдает соответствующие инструкции по количеству загруженных мешков.
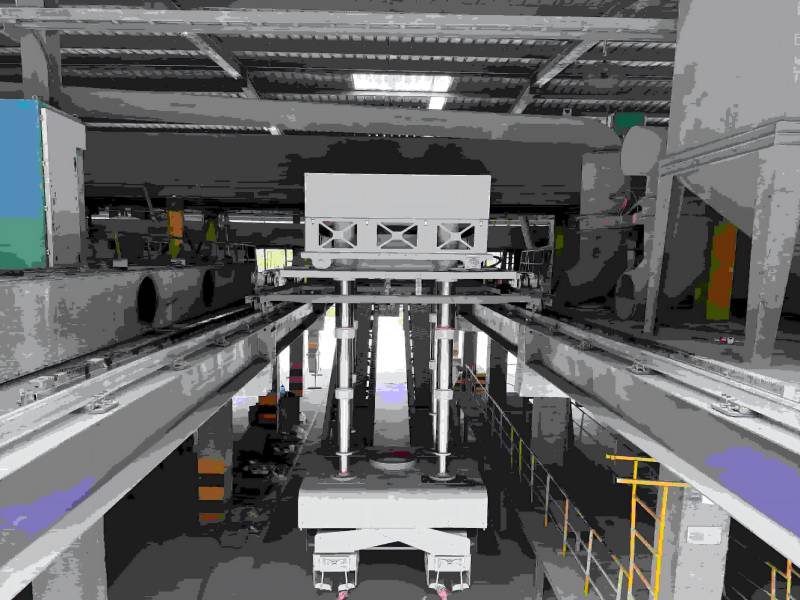
Эффект от применения:
Как показали результаты погрузки после внедрения роботизированного погрузчика в нашей компании, роботизированный погрузчик завершил архитектуру облачной платформы интеллектуального погрузчика, реализовав сочетание локальной и облачной платформ, а также интеллектуальное удаленное обслуживание и совместное использование погрузки. Это позволяет пользователю устранять неисправности погрузчика на месте, а производителю — оперативно и удаленно решать технические проблемы, возникающие у пользователей во время эксплуатации.


















 IPv6 ПОДДЕРЖИВАЕТСЯ СЕТЬ
IPv6 ПОДДЕРЖИВАЕТСЯ СЕТЬ